Keeping House: Documenting the Print Lab

Specifications:
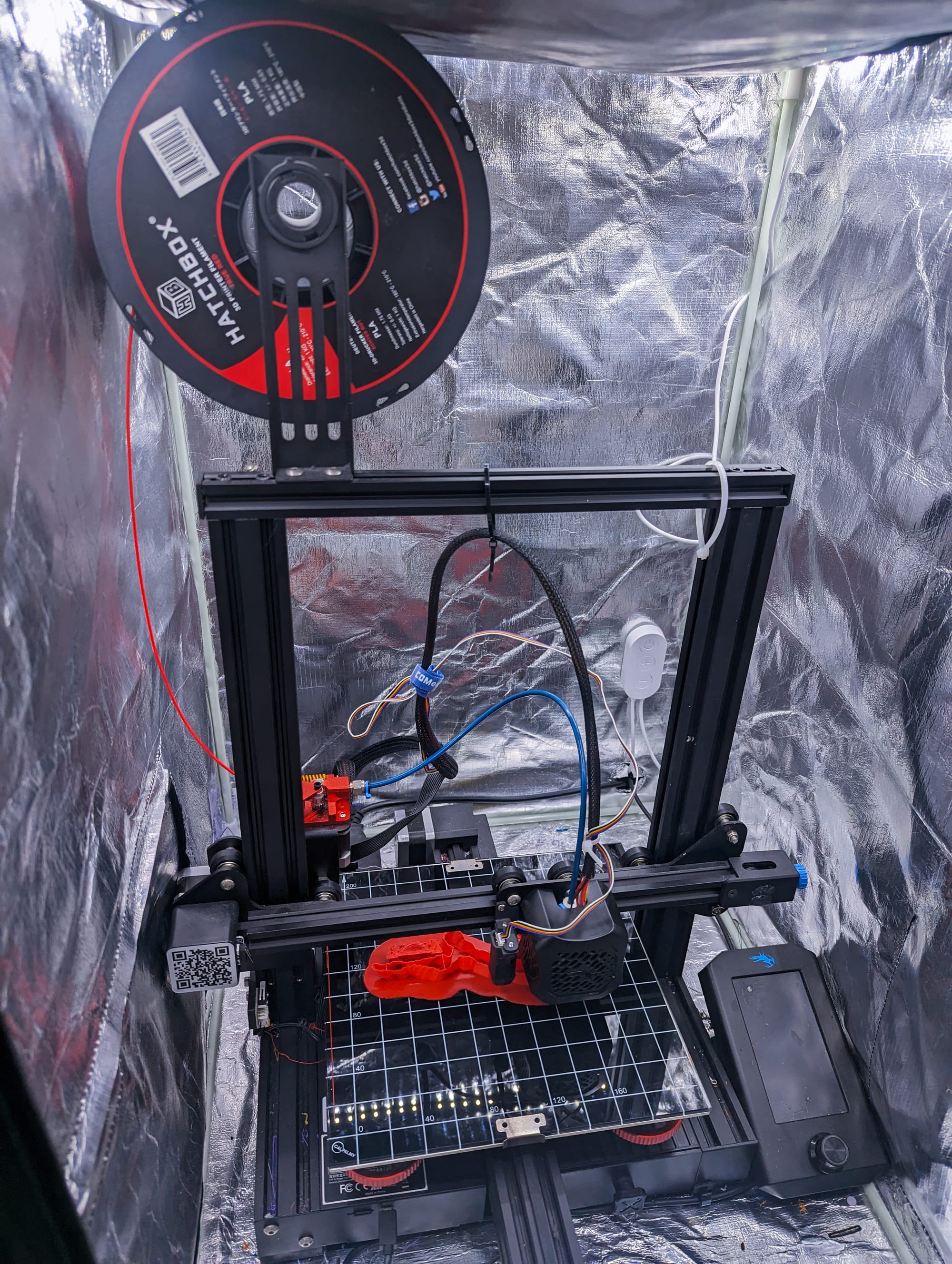
Printer: Ender 3 v2 Pro
- Bed leveling:
ManualSemi Manual/Automatic - Built-in camera for monitoring: No
- Closed print chamber:
No, an open structureAdded Enclosure - Connectivity:
SD cardRemote access via Mainsail/Moonraker/Klipper over Raspberry Pi 4B+ - Display: LCD
- Extruder type:
SingleDual-Gear Extruder - Feeder system: Bowden
- Bowden Tube:
Stock PTFE Teflon Bowden TubeCreality Official 1 Meter Capricorn Teflon Tube PTFE Bowden Tubing - Filament runout detection: No
- Firmware: Open-source
- Frame: Aluminum
- Manufacturer: Creality
- Manufacturer country: China
- Max extruder temperature: 250 °C (Safe temp of 240 °C)
- Max heated bed temperature: 212 °F / 100 °C
- Mechanical arrangement: Cartesian-XZ-Head
- Nozzle Material:
BrassHardened Steel - Nozzle size, mm: 0.4
- Outer dimensions millimeters (xyz): 475 x 470 x 620 mm
- Print recovery: Yes
- Weight kg: 8 kg
- Build volume: 220 x 220 x 250 mm
- Layer height: 100 - 400 Microns
- Technology: FFF/FDM
Upgrade list:
- [x] Creality Official 1 Meter Capricorn Teflon Tube PTFE Bowden Tubing
- [x] Creality CR Touch Auto Bed Leveling Sensor Kit for Ender 3 V2
- [x] Hardened Steel Nozzle 0.4 mm/ 1.75 mm
- [x] BZ 3D Ender 3 Dual Gear Extruder,Dual Drive Metal Extruder for Ender 3 V2
- [x] 3D Printer Glass Bed 235 x 235 x 4.0 (mm)
- [x] Comgrow Creality 4Pcs Metal Leveling Nuts and Springs Upgraded Set for Ender 3
3D Print Server - Mainsail/Moonraker/Klipper
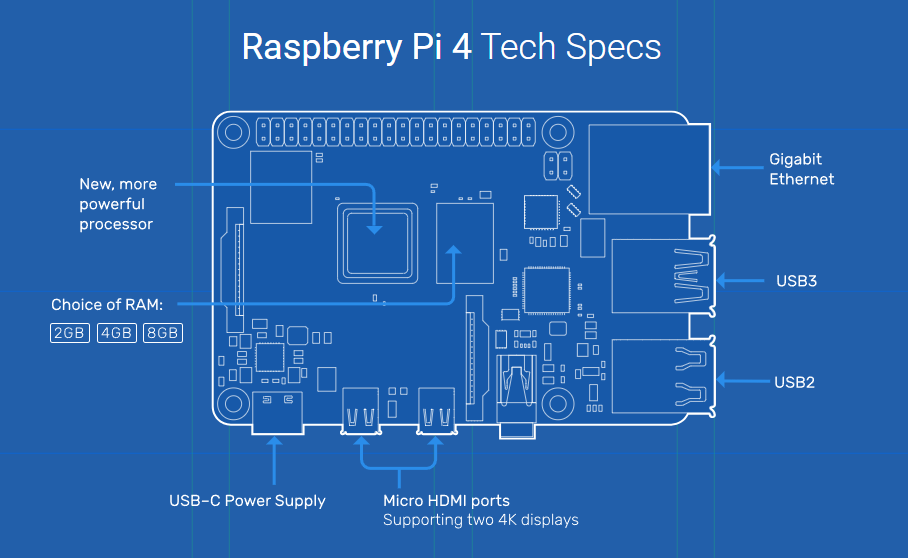
- Broadcom BCM2711, Quad core Cortex-A72 (ARM v8) 64-bit SoC @ 1.8GHz
- 1GB, 2GB, 4GB or 8GB LPDDR4-3200 SDRAM (depending on model)
- 2.4 GHz and 5.0 GHz IEEE 802.11ac wireless, Bluetooth 5.0, BLE
- Gigabit Ethernet
- 2 USB 3.0 ports; 2 USB 2.0 ports.
- Raspberry Pi standard 40 pin GPIO header (fully backwards compatible with previous boards)
- 2 × micro-HDMI® ports (up to 4kp60 supported)
- 2-lane MIPI DSI display port
- 2-lane MIPI CSI camera port
- 4-pole stereo audio and composite video port
- H.265 (4kp60 decode), H264 (1080p60 decode, 1080p30 encode)
- OpenGL ES 3.1, Vulkan 1.0
- Micro-SD card slot for loading operating system and data storage
- 5V DC via USB-C connector (minimum 3A*)
- 5V DC via GPIO header (minimum 3A*)
- Power over Ethernet (PoE) enabled (requires separate PoE HAT)
- Operating temperature: 0 – 50 degrees C ambient
- A good quality 2.5A power supply can be used if downstream USB peripherals consume less than 500mA in total.
Welcome to my lab; I'm Jake, and today I'm going to attempt to document my 3D Printer setup. Recently I decided I should try to upgrade the underlying OS on my Raspberry Pi 4B, and much like Icarus, it seems I flew too close to the sun. At some point during the upgrade, we lost some important files on our SD card and a reimage was needed. As I searched high and low for backups of my config, I realized I did not know where I had put them. Lesson learned – because I then spent my entire day re-reading Klipper documentation and getting my printer back up and running. After some back and forth on Discord and reacquainting myself with Mainsail, we're back in business and printing. I thought this would be a perfect opportunity to get some documentation started and put it somewhere to live.
Sometimes I make 3D models to print and if you're interested in following my uploads, check me out on my Cults profile. I have a lot of stuff in my storage I may break out and upload there so keep an eye out.
Next time, we're going to install a Creality Spider All-Metal Hotend and dip our toes into the waters of soldering. Maybe. Hopefully not. Either way, I'll try to document as much of the process here as I can. The Goal is to print PETG and ABS, so some venting is in our future as well!
See below for relevant config files

mainsail.cfg
## Client klipper macro definitions
##
## Copyright (C) 2022 Alex Zellner
##
## This file may be distributed under the terms of the GNU GPLv3 license
##
## !!! This file is read-only. Maybe the used editor indicates that. !!!
##
## Customization:
## 1) copy the gcode_macro _CLIENT_VARIABLE (see below) to your printer.cfg
## 2) remove the comment mark (#) from all lines
## 3) change any value in there to your needs
##
## Use the PAUSE macro direct in your M600:
## e.g. with a different park position front left and a minimal height of 50
## [gcode_macro M600]
## description: Filament change
## gcode: PAUSE X=10 Y=10 Z_MIN=50
## Z_MIN will park the toolhead at a minimum of 50 mm above to bed to make it easier for you to swap filament.
##
## Client variable macro for your printer.cfg
#[gcode_macro _CLIENT_VARIABLE]
#variable_use_custom_pos : False ; use custom park coordinates for x,y [True/False]
#variable_custom_park_x : 0.0 ; custom x position; value must be within your defined min and max of X
#variable_custom_park_y : 0.0 ; custom y position; value must be within your defined min and max of Y
#variable_custom_park_dz : 2.0 ; custom dz value; the value in mm to lift the nozzle when move to park position
#variable_retract : 1.0 ; the value to retract while PAUSE
#variable_cancel_retract : 5.0 ; the value to retract while CANCEL_PRINT
#variable_speed_retract : 35.0 ; retract speed in mm/s
#variable_unretract : 1.0 ; the value to unretract while RESUME
#variable_speed_unretract : 35.0 ; unretract speed in mm/s
#variable_speed_hop : 15.0 ; z move speed in mm/s
#variable_speed_move : 100.0 ; move speed in mm/s
#variable_park_at_cancel : False ; allow to move the toolhead to park while execute CANCEL_PRINT [True/False]
#variable_park_at_cancel_x : None ; different park position during CANCEL_PRINT [None/Position as Float]; park_at_cancel must be True
#variable_park_at_cancel_y : None ; different park position during CANCEL_PRINT [None/Position as Float]; park_at_cancel must be True
## !!! Caution [firmware_retraction] must be defined in the printer.cfg if you set use_fw_retract: True !!!
#variable_use_fw_retract : False ; use fw_retraction instead of the manual version [True/False]
#variable_idle_timeout : 0 ; time in sec until idle_timeout kicks in. Value 0 means that no value will be set or restored
#variable_runout_sensor : "" ; If a sensor is defined, it will be used to cancel the execution of RESUME in case no filament is detected.
## Specify the config name of the runout sensor e.g "filament_switch_sensor runout". Hint use the same as in your printer.cfg
## !!! Custom macros, please use with care and review the section of the corresponding macro.
## These macros are for simple operations like setting a status LED. Please make sure your macro does not interfere with the basic macro functions.
## Only single line commands are supported, please create a macro if you need more than one command.
#variable_user_pause_macro : "" ; Everything inside the "" will be executed after the klipper base pause (PAUSE_BASE) function
#variable_user_resume_macro: "" ; Everything inside the "" will be executed before the klipper base resume (RESUME_BASE) function
#variable_user_cancel_macro: "" ; Everything inside the "" will be executed before the klipper base cancel (CANCEL_PRINT_BASE) function
#gcode:
[virtual_sdcard]
path: ~/printer_data/gcodes
on_error_gcode: CANCEL_PRINT
[pause_resume]
#recover_velocity: 50.
# When capture/restore is enabled, the speed at which to return to
# the captured position (in mm/s). Default is 50.0 mm/s.
[display_status]
[respond]
[gcode_macro CANCEL_PRINT]
description: Cancel the actual running print
rename_existing: CANCEL_PRINT_BASE
gcode:
##### get user parameters or use default #####
{% set client = printer['gcode_macro _CLIENT_VARIABLE']|default({}) %}
{% set allow_park = client.park_at_cancel|default(false)|lower == 'true' %}
{% set retract = client.cancel_retract|default(5.0)|abs %}
##### define park position #####
{% set park_x = "" if (client.park_at_cancel_x|default(none) is none)
else "X=" ~ client.park_at_cancel_x %}
{% set park_y = "" if (client.park_at_cancel_y|default(none) is none)
else "Y=" ~ client.park_at_cancel_y %}
{% set custom_park = park_x|length > 0 or park_y|length > 0 %}
##### end of definitions #####
# restore idle_timeout time if needed
{% if printer['gcode_macro RESUME'].restore_idle_timeout > 0 %}
SET_IDLE_TIMEOUT TIMEOUT={printer['gcode_macro RESUME'].restore_idle_timeout}
{% endif %}
{% if (custom_park or not printer.pause_resume.is_paused) and allow_park %} _TOOLHEAD_PARK_PAUSE_CANCEL {park_x} {park_y} {% endif %}
_CLIENT_RETRACT LENGTH={retract}
TURN_OFF_HEATERS
M106 S0
{client.user_cancel_macro|default("")}
SET_GCODE_VARIABLE MACRO=RESUME VARIABLE=idle_state VALUE=False
# clear pause_next_layer and pause_at_layer as preparation for next print
SET_PAUSE_NEXT_LAYER ENABLE=0
SET_PAUSE_AT_LAYER ENABLE=0 LAYER=0
CANCEL_PRINT_BASE
[gcode_macro PAUSE]
description: Pause the actual running print
rename_existing: PAUSE_BASE
gcode:
##### get user parameters or use default #####
{% set client = printer['gcode_macro _CLIENT_VARIABLE']|default({}) %}
{% set idle_timeout = client.idle_timeout|default(0) %}
{% set temp = printer[printer.toolhead.extruder].target if printer.toolhead.extruder != '' else 0 %}
{% set restore = False if printer.toolhead.extruder == ''
else True if params.RESTORE|default(1)|int == 1 else False %}
##### end of definitions #####
SET_GCODE_VARIABLE MACRO=RESUME VARIABLE=last_extruder_temp VALUE="{{'restore': restore, 'temp': temp}}"
# set a new idle_timeout value
{% if idle_timeout > 0 %}
SET_GCODE_VARIABLE MACRO=RESUME VARIABLE=restore_idle_timeout VALUE={printer.configfile.settings.idle_timeout.timeout}
SET_IDLE_TIMEOUT TIMEOUT={idle_timeout}
{% endif %}
PAUSE_BASE
{client.user_pause_macro|default("")}
_TOOLHEAD_PARK_PAUSE_CANCEL {rawparams}
[gcode_macro RESUME]
description: Resume the actual running print
rename_existing: RESUME_BASE
variable_last_extruder_temp: {'restore': False, 'temp': 0}
variable_restore_idle_timeout: 0
variable_idle_state: False
gcode:
##### get user parameters or use default #####
{% set client = printer['gcode_macro _CLIENT_VARIABLE']|default({}) %}
{% set velocity = printer.configfile.settings.pause_resume.recover_velocity %}
{% set sp_move = client.speed_move|default(velocity) %}
{% set runout_resume = True if client.runout_sensor|default("") == "" # no runout
else True if not printer[client.runout_sensor].enabled # sensor is disabled
else printer[client.runout_sensor].filament_detected %} # sensor status
{% set can_extrude = True if printer.toolhead.extruder == '' # no extruder defined in config
else printer[printer.toolhead.extruder].can_extrude %} # status of active extruder
{% set do_resume = False %}
{% set prompt_txt = [] %}
##### end of definitions #####
#### Printer comming from timeout idle state ####
{% if printer.idle_timeout.state|upper == "IDLE" or idle_state %}
SET_GCODE_VARIABLE MACRO=RESUME VARIABLE=idle_state VALUE=False
{% if last_extruder_temp.restore %}
# we need to use the unicode (\u00B0) for the ° as py2 env's would throw an error otherwise
RESPOND TYPE=echo MSG='{"Restoring \"%s\" temperature to %3.1f\u00B0C, this may take some time" % (printer.toolhead.extruder, last_extruder_temp.temp) }'
M109 S{last_extruder_temp.temp}
{% set do_resume = True %}
{% elif can_extrude %}
{% set do_resume = True %}
{% else %}
RESPOND TYPE=error MSG='{"Resume aborted !!! \"%s\" not hot enough, please heat up again and press RESUME" % printer.toolhead.extruder}'
{% set _d = prompt_txt.append("\"%s\" not hot enough, please heat up again and press RESUME" % printer.toolhead.extruder) %}
{% endif %}
#### Printer comming out of regular PAUSE state ####
{% elif can_extrude %}
{% set do_resume = True %}
{% else %}
RESPOND TYPE=error MSG='{"Resume aborted !!! \"%s\" not hot enough, please heat up again and press RESUME" % printer.toolhead.extruder}'
{% set _d = prompt_txt.append("\"%s\" not hot enough, please heat up again and press RESUME" % printer.toolhead.extruder) %}
{% endif %}
{% if runout_resume %}
{% if do_resume %}
{% if restore_idle_timeout > 0 %} SET_IDLE_TIMEOUT TIMEOUT={restore_idle_timeout} {% endif %} # restore idle_timeout time
{client.user_resume_macro|default("")}
_CLIENT_EXTRUDE
RESUME_BASE VELOCITY={params.VELOCITY|default(sp_move)}
{% endif %}
{% else %}
RESPOND TYPE=error MSG='{"Resume aborted !!! \"%s\" detects no filament, please load filament and press RESUME" % (client.runout_sensor.split(" "))[1]}'
{% set _d = prompt_txt.append("\"%s\" detects no filament, please load filament and press RESUME" % (client.runout_sensor.split(" "))[1]) %}
{% endif %}
##### Generate User Information box in case of abort #####
{% if not (runout_resume and do_resume) %}
RESPOND TYPE=command MSG="action:prompt_begin RESUME aborted !!!"
{% for element in prompt_txt %}
RESPOND TYPE=command MSG='{"action:prompt_text %s" % element}'
{% endfor %}
RESPOND TYPE=command MSG="action:prompt_footer_button Ok|RESPOND TYPE=command MSG=action:prompt_end|info"
RESPOND TYPE=command MSG="action:prompt_show"
{% endif %}
# Usage: SET_PAUSE_NEXT_LAYER [ENABLE=[0|1]] [MACRO=]
[gcode_macro SET_PAUSE_NEXT_LAYER]
description: Enable a pause if the next layer is reached
gcode:
{% set pause_next_layer = printer['gcode_macro SET_PRINT_STATS_INFO'].pause_next_layer %}
{% set ENABLE = params.ENABLE|default(1)|int != 0 %}
{% set MACRO = params.MACRO|default(pause_next_layer.call, True) %}
SET_GCODE_VARIABLE MACRO=SET_PRINT_STATS_INFO VARIABLE=pause_next_layer VALUE="{{ 'enable': ENABLE, 'call': MACRO }}"
# Usage: SET_PAUSE_AT_LAYER [ENABLE=[0|1]] [LAYER=] [MACRO=]
[gcode_macro SET_PAUSE_AT_LAYER]
description: Enable/disable a pause if a given layer number is reached
gcode:
{% set pause_at_layer = printer['gcode_macro SET_PRINT_STATS_INFO'].pause_at_layer %}
{% set ENABLE = params.ENABLE|int != 0 if params.ENABLE is defined
else params.LAYER is defined %}
{% set LAYER = params.LAYER|default(pause_at_layer.layer)|int %}
{% set MACRO = params.MACRO|default(pause_at_layer.call, True) %}
SET_GCODE_VARIABLE MACRO=SET_PRINT_STATS_INFO VARIABLE=pause_at_layer VALUE="{{ 'enable': ENABLE, 'layer': LAYER, 'call': MACRO }}"
# Usage: SET_PRINT_STATS_INFO [TOTAL_LAYER=] [CURRENT_LAYER= ]
[gcode_macro SET_PRINT_STATS_INFO]
rename_existing: SET_PRINT_STATS_INFO_BASE
description: Overwrite, to get pause_next_layer and pause_at_layer feature
variable_pause_next_layer: { 'enable': False, 'call': "PAUSE" }
variable_pause_at_layer : { 'enable': False, 'layer': 0, 'call': "PAUSE" }
gcode:
{% if pause_next_layer.enable %}
RESPOND TYPE=echo MSG='{"%s, forced by pause_next_layer" % pause_next_layer.call}'
{pause_next_layer.call} ; execute the given gcode to pause, should be either M600 or PAUSE
SET_PAUSE_NEXT_LAYER ENABLE=0
{% elif pause_at_layer.enable and params.CURRENT_LAYER is defined and params.CURRENT_LAYER|int == pause_at_layer.layer %}
RESPOND TYPE=echo MSG='{"%s, forced by pause_at_layer [%d]" % (pause_at_layer.call, pause_at_layer.layer)}'
{pause_at_layer.call} ; execute the given gcode to pause, should be either M600 or PAUSE
SET_PAUSE_AT_LAYER ENABLE=0
{% endif %}
SET_PRINT_STATS_INFO_BASE {rawparams}
##### internal use #####
[gcode_macro _TOOLHEAD_PARK_PAUSE_CANCEL]
description: Helper: park toolhead used in PAUSE and CANCEL_PRINT
gcode:
##### get user parameters or use default #####
{% set client = printer['gcode_macro _CLIENT_VARIABLE']|default({}) %}
{% set velocity = printer.configfile.settings.pause_resume.recover_velocity %}
{% set use_custom = client.use_custom_pos|default(false)|lower == 'true' %}
{% set custom_park_x = client.custom_park_x|default(0.0) %}
{% set custom_park_y = client.custom_park_y|default(0.0) %}
{% set park_dz = client.custom_park_dz|default(2.0)|abs %}
{% set sp_hop = client.speed_hop|default(15) * 60 %}
{% set sp_move = client.speed_move|default(velocity) * 60 %}
##### get config and toolhead values #####
{% set origin = printer.gcode_move.homing_origin %}
{% set act = printer.gcode_move.gcode_position %}
{% set max = printer.toolhead.axis_maximum %}
{% set cone = printer.toolhead.cone_start_z|default(max.z) %} ; height as long the toolhead can reach max and min of an delta
{% set round_bed = True if printer.configfile.settings.printer.kinematics is in ['delta','polar','rotary_delta','winch']
else False %}
##### define park position #####
{% set z_min = params.Z_MIN|default(0)|float %}
{% set z_park = [[(act.z + park_dz), z_min]|max, (max.z - origin.z)]|min %}
{% set x_park = params.X if params.X is defined
else custom_park_x if use_custom
else 0.0 if round_bed
else (max.x - 5.0) %}
{% set y_park = params.Y if params.Y is defined
else custom_park_y if use_custom
else (max.y - 5.0) if round_bed and z_park < cone
else 0.0 if round_bed
else (max.y - 5.0) %}
##### end of definitions #####
_CLIENT_RETRACT
{% if "xyz" in printer.toolhead.homed_axes %}
G90
G1 Z{z_park} F{sp_hop}
G1 X{x_park} Y{y_park} F{sp_move}
{% if not printer.gcode_move.absolute_coordinates %} G91 {% endif %}
{% else %}
RESPOND TYPE=echo MSG='Printer not homed'
{% endif %}
[gcode_macro _CLIENT_EXTRUDE]
description: Extrudes, if the extruder is hot enough
gcode:
##### get user parameters or use default #####
{% set client = printer['gcode_macro _CLIENT_VARIABLE']|default({}) %}
{% set use_fw_retract = (client.use_fw_retract|default(false)|lower == 'true') and (printer.firmware_retraction is defined) %}
{% set length = params.LENGTH|default(client.unretract)|default(1.0)|float %}
{% set speed = params.SPEED|default(client.speed_unretract)|default(35) %}
{% set absolute_extrude = printer.gcode_move.absolute_extrude %}
##### end of definitions #####
{% if printer.toolhead.extruder != '' %}
{% if printer[printer.toolhead.extruder].can_extrude %}
{% if use_fw_retract %}
{% if length < 0 %}
G10
{% else %}
G11
{% endif %}
{% else %}
M83
G1 E{length} F{(speed|float|abs) * 60}
{% if absolute_extrude %}
M82
{% endif %}
{% endif %}
{% else %}
RESPOND TYPE=echo MSG='{"\"%s\" not hot enough" % printer.toolhead.extruder}'
{% endif %}
{% endif %}
[gcode_macro _CLIENT_RETRACT]
description: Retracts, if the extruder is hot enough
gcode:
{% set client = printer['gcode_macro _CLIENT_VARIABLE']|default({}) %}
{% set length = params.LENGTH|default(client.retract)|default(1.0)|float %}
{% set speed = params.SPEED|default(client.speed_retract)|default(35) %}
_CLIENT_EXTRUDE LENGTH=-{length|float|abs} SPEED={speed|float|abs}
moonraker.conf
[server]
host: 0.0.0.0
port: 7125
# The maximum size allowed for a file upload (in MiB). Default 1024 MiB
max_upload_size: 1024
# Path to klippy Unix Domain Socket
klippy_uds_address: ~/printer_data/comms/klippy.sock
[file_manager]
# post processing for object cancel. Not recommended for low resource SBCs such as a Pi Zero. Default False
enable_object_processing: False
[authorization]
cors_domains:
https://my.mainsail.xyz
http://my.mainsail.xyz
http://*.local
http://*.lan
trusted_clients:
10.0.0.0/8
127.0.0.0/8
169.254.0.0/16
172.16.0.0/12
192.168.0.0/16
FE80::/10
::1/128
# enables partial support of Octoprint API
[octoprint_compat]
# enables moonraker to track and store print history.
[history]
# this enables moonraker announcements for mainsail
[announcements]
subscriptions:
mainsail
# this enables moonraker's update manager
[update_manager]
refresh_interval: 168
enable_auto_refresh: True
[update_manager mainsail]
type: web
channel: stable
repo: mainsail-crew/mainsail
path: ~/mainsail
[update_manager mainsail-config]
type: git_repo
primary_branch: master
path: ~/mainsail-config
origin: https://github.com/mainsail-crew/mainsail-config.git
managed_services: klipper
### moonraker-timelapse
### Don't forget to include timelapse.cfg to your printer.cfg
### Uncomment to enable moonraker-timelapse
#[update_manager timelapse]
#type: git_repo
#primary_branch: main
#path: ~/moonraker-timelapse
#origin: https://github.com/mainsail-crew/moonraker-timelapse.git
#managed_services: klipper moonraker
#[timelapse]
### Directory where the generated video will be saved
#output_path: ~/timelapse/
### Directory where ffmpeg is installed
#ffmpeg_binary_path: /usr/bin/ffmpeg
# Crowsnest update_manager entry
[update_manager crowsnest]
type: git_repo
path: ~/crowsnest
origin: https://github.com/mainsail-crew/crowsnest.git
managed_services: crowsnest
install_script: tools/pkglist.sh
# Sonar update_manager entry
[update_manager sonar]
type: git_repo
path: ~/sonar
origin: https://github.com/mainsail-crew/sonar.git
primary_branch: main
managed_services: sonar
install_script: tools/install.sh
[power 3D_Printer]
type: tplink_smartplug
# The type of device. Can be either gpio, klipper_device, rf,
# tplink_smartplug, tasmota, shelly, homeseer, homeassistant, loxonev1,
# smartthings, or mqtt.
# This parameter must be provided.
address: 10.0.0.47
#
#
#
off_when_shutdown: True
# If set to True the device will be powered off when Klipper enters
# the "shutdown" state. This option applies to all device types.
# The default is False.
off_when_shutdown_delay: 0
# If "off_when_shutdown" is set, this option specifies the amount of time
# (in seconds) to wait before turning the device off. Default is 0 seconds.
on_when_job_queued: True
# If set to True the device will power on if a job is queued while the
# device is off. This allows for an automated "upload, power on, and
# print" approach directly from the slicer, see the configuration example
# below for details. The default is False.
locked_while_printing: True
# If True, locks the device so that the power cannot be changed while the
# printer is printing. This is useful to avert an accidental shutdown to
# the printer's power. The default is False.
restart_klipper_when_powered: True
# If set to True, Moonraker will schedule a "FIRMWARE_RESTART" to command
# after the device has been powered on. If it isn't possible to immediately
# schedule a firmware restart (ie: Klippy is disconnected), the restart
# will be postponed until Klippy reconnects and reports that startup is
# complete. Prior to scheduling the restart command the power device will
# always check Klippy's state. If Klippy reports that it is "ready", the
# FIRMWARE_RESTART will be aborted as unnecessary.
# The default is False.
restart_delay: 1.
# If "restart_klipper_when_powered" is set, this option specifies the amount
# of time (in seconds) to delay the restart. Default is 1 second.
bound_service: klipper
# Can be set to any service Moonraker is authorized to manage with the
# exception of the moonraker service itself. See the tip below this section
# for details on what services are authorized. When a bound service has
# been set the service will be started when the device powers on and stopped
# when the device powers off. The default is no service is bound to the
# device.
[power Print_Enclosure_Lights]
type: tplink_smartplug
# The type of device. Can be either gpio, klipper_device, rf,
# tplink_smartplug, tasmota, shelly, homeseer, homeassistant, loxonev1,
# smartthings, or mqtt.
# This parameter must be provided.
address: 10.0.0.16
#
#
#
off_when_shutdown: True
# If set to True the device will be powered off when Klipper enters
# the "shutdown" state. This option applies to all device types.
# The default is False.
off_when_shutdown_delay: 0
# If "off_when_shutdown" is set, this option specifies the amount of time
# (in seconds) to wait before turning the device off. Default is 0 seconds.
on_when_job_queued: True
# If set to True the device will power on if a job is queued while the
# device is off. This allows for an automated "upload, power on, and
# print" approach directly from the slicer, see the configuration example
# below for details. The default is False.
locked_while_printing: True
# If True, locks the device so that the power cannot be changed while the
# printer is printing. This is useful to avert an accidental shutdown to
# the printer's power. The default is False.
restart_klipper_when_powered: True
# If set to True, Moonraker will schedule a "FIRMWARE_RESTART" to command
# after the device has been powered on. If it isn't possible to immediately
# schedule a firmware restart (ie: Klippy is disconnected), the restart
# will be postponed until Klippy reconnects and reports that startup is
# complete. Prior to scheduling the restart command the power device will
# always check Klippy's state. If Klippy reports that it is "ready", the
# FIRMWARE_RESTART will be aborted as unnecessary.
# The default is False.
restart_delay: 1.
# If "restart_klipper_when_powered" is set, this option specifies the amount
# of time (in seconds) to delay the restart. Default is 1 second.
bound_service: klipper
# Can be set to any service Moonraker is authorized to manage with the
# exception of the moonraker service itself. See the tip below this section
# for details on what services are authorized. When a bound service has
# been set the service will be started when the device powers on and stopped
# when the device powers off. The default is no service is bound to the
# device.
crowsnest.conf
#### crowsnest.conf
#### This is a typical default config.
#### Also used as default in mainsail / MainsailOS
#### See:
#### https://github.com/mainsail-crew/crowsnest/blob/master/README.md
#### for details to configure to your needs.
#####################################################################
#### #####
#### Information about ports and according URL's #####
#### #####
#####################################################################
#### #####
#### Port 8080 equals /webcam/?action=[stream/snapshot] #####
#### Port 8081 equals /webcam2/?action=[stream/snapshot] #####
#### Port 8082 equals /webcam3/?action=[stream/snapshot] #####
#### Port 8083 equals /webcam4/?action=[stream/snapshot] #####
#### #####
#####################################################################
#### RTSP Stream URL: ( if enabled and supported ) #####
#### rtsp://:/stream.h264 #####
#####################################################################
[crowsnest]
log_path: /home/jake/printer_data/logs/crowsnest.log
log_level: verbose # Valid Options are quiet/verbose/debug
delete_log: false # Deletes log on every restart, if set to true
no_proxy: false
[cam nozzle]
mode: ustreamer # ustreamer - Provides mjpg and snapshots. (All devices)
# camera-streamer - Provides webrtc, mjpg and snapshots. (rpi + Raspi OS based only)
enable_rtsp: false # If camera-streamer is used, this enables also usage of an rtsp server
rtsp_port: 8554 # Set different ports for each device!
port: 8080 # HTTP/MJPG Stream/Snapshot Port
device: /dev/video0 # See Log for available ...
resolution: 640x480 # widthxheight format
max_fps: 12 # If Hardware Supports this it will be forced, otherwise ignored/coerced.
#custom_flags: # You can run the Stream Services with custom flags.
#v4l2ctl: # Add v4l2-ctl parameters to setup your camera, see Log what your cam is capable of.
printer.cfg
# This file contains pin mappings for the Creality "v4.2.7" board. To
# use this config, during "make menuconfig" select the STM32F103 with
# a "28KiB bootloader" and serial (on USART1 PA10/PA9) communication.
# If you prefer a direct serial connection, in "make menuconfig"
# select "Enable extra low-level configuration options" and select
# serial (on USART3 PB11/PB10), which is broken out on the 10 pin IDC
# cable used for the LCD module as follows:
# 3: Tx, 4: Rx, 9: GND, 10: VCC
# Flash this firmware by copying "out/klipper.bin" to a SD card and
# turning on the printer with the card inserted. The firmware
# filename must end in ".bin" and must not match the last filename
# that was flashed.
# See docs/Config_Reference.md for a description of parameters.
[include mainsail.cfg]
[stepper_x]
step_pin: PC2
dir_pin: PB9
enable_pin: !PC3
microsteps: 16
rotation_distance: 40
endstop_pin: ^PA5
position_endstop: 0
position_max: 245
homing_speed: 50
[stepper_y]
step_pin: PB8
dir_pin: PB7
enable_pin: !PC3
microsteps: 16
rotation_distance: 40
endstop_pin: ^PA6
position_endstop: 0
position_max: 230
homing_speed: 50
# If the BL-Touch will be used to home the Z axis then set `endstop_pin:
# probe:z_virtual_endstop` and remove `position_endstop` in the `[stepper_z]` config section,
# then add a `[safe_z_home]` config section to raise the z axis, home the xy axes,
# move to the center of the bed, and home the z axis. For example:
[stepper_z]
step_pin: PB6
dir_pin: !PB5
enable_pin: !PC3
microsteps: 16
rotation_distance: 8
endstop_pin: probe:z_virtual_endstop # Comment out if not using BL/CR-Touch
#endstop_pin: ^PA7 # Uncomment if not using BL/CR-Touch
#position_endstop: 0.0 # Uncomment if not using BL/CR-Touch
position_max: 240
position_min: -2
[extruder]
max_extrude_only_distance: 100.0
step_pin: PB4
dir_pin: PB3
enable_pin: !PC3
microsteps: 16
rotation_distance: 22.546 # Change value to 34.406 if not using Micro Swiss Dual Gear Extruder
nozzle_diameter: 0.400
filament_diameter: 1.750
heater_pin: PA1
sensor_type: EPCOS 100K B57560G104F
sensor_pin: PC5
control: pid
# tuned for stock hardware with 230 degree Celsius target
pid_Kp: 22.605
pid_Ki: 1.215
pid_Kd: 105.112
min_temp: 0
max_temp: 300
pressure_advance = 1.0
[heater_bed]
heater_pin: PA2
sensor_type: EPCOS 100K B57560G104F
sensor_pin: PC4
control: pid
# tuned for stock hardware with 80 degree Celsius target
pid_Kp: 74.533
pid_Ki: 1.854
pid_Kd: 749.059
min_temp: 0
max_temp: 130
[fan]
pin: PA0
[mcu]
serial: /dev/serial/by-id/usb-1a86_USB_Serial-if00-port0
restart_method: command
[printer]
kinematics: cartesian
max_velocity: 300
max_accel: 3000
max_z_velocity: 5
max_z_accel: 100
[board_pins]
aliases:
EXP1_1=PC6,EXP1_3=PB10,EXP1_5=PB14,EXP1_7=PB12,EXP1_9=,
EXP1_2=PB2,EXP1_4=PB11,EXP1_6=PB13,EXP1_8=PB15,EXP1_10=<5v>,
PROBE_IN=PB0,PROBE_OUT=PB1,FIL_RUNOUT=PC6
[bltouch]
sensor_pin: ^PB1
control_pin: PB0
x_offset: -45.5
y_offset: -6
#z_offset: 8 #1.40
[safe_z_home]
home_xy_position: 117.5,117.5 # Change coordinates to the center of your print bed
z_hop: 10 # Move up 10mm z_hop_speed: 5
[bed_mesh]
speed: 120
horizontal_move_z: 5
mesh_min: 5, 5
mesh_max: 183, 198
probe_count: 5,3
[screws_tilt_adjust]
screw1: 77.5, 31.5
screw1_name: front left screw
screw2: 234.5, 31.5
screw2_name: front right screw
screw3: 234.5, 201.5
screw3_name: rear right screw
screw4: 77.5, 201.5
screw4_name: rear left screw
horizontal_move_z: 10.
speed: 50.
screw_thread: CW-M3
# [filament_switch_sensor spool]
# pause_on_runout: True
# switch_pin: ^!PA6
# K-FAN2
# [fan_generic k_fan2]
# pin: PC0
# K-FAN3
# [fan_generic k_fan3]
# pin: PC1
# [temperature_sensor mcu_temp]
# sensor_type: temperature_mcu
# min_temp: 0
# max_temp: 100
# Neopixel LED support
# [neopixel led_neopixel]
# pin: PC14
# BL-touch
# [bltouch]
# control_pin: PB0
# sensor_pin: PB1
# TMC Uart Mod Pins:
# https://github.com/adelyser/Marlin-CR30/wiki
# [tmc2208 stepper_x]
# uart_pin: PB0
#
# [tmc2208 stepper_y]
# uart_pin: PB1
#
# [tmc2208 stepper_z]
# uart_pin: PA13
#
# [tmc2208 extruder]
# uart_pin: PA14
# [display]
# lcd_type: st7920
# cs_pin: PB12
# sclk_pin: PB13
# sid_pin: PB15
# encoder_pins: ^PB14, ^PB10
# click_pin: ^!PB2
# [output_pin beeper]
# pin: PC6
#*# <---------------------- save_config ---------------------->
#*# DO NOT EDIT THIS BLOCK OR BELOW. The contents are auto-generated.
#*#
#*# [bltouch]
#*# z_offset = 0.490